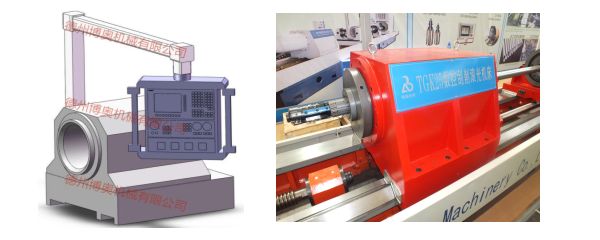
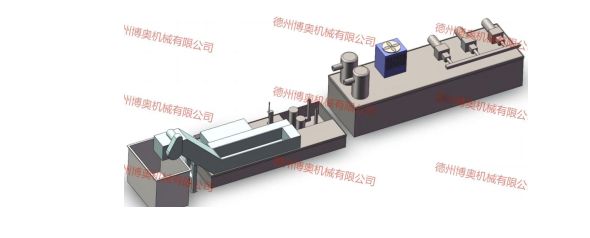
TGK 36 Deep Hole CNC Advanced Boring & Grinding Machine
စက်ဇာတ်ကောင်
TGK25 စီးရီး CNC skiving & rolling machine tool သည် fixed workpiece နှင့် rotary feed ၏ processing method ကို လက်ခံပါသည်။စက်ကိရိယာသည် workpieces ၏အတွင်းပိုင်းအပေါက်များ၏ ငြီးငွေ့ဖွယ်ကောင်းခြင်း၊ ခြစ်ခြင်းနှင့် လှိမ့်ခြင်းလုပ်ဆောင်ခြင်းတို့ကို သိရှိနိုင်ပြီး၊ စီမံဆောင်ရွက်သည့်နည်းလမ်းသည် ရိုးရှင်းပြီး ပြုပြင်ထားသောထုတ်ကုန်များသည် တိကျမှုမြင့်မားသည်။ဤစက်ကိရိယာ၏အဓိကအားသာချက်များမှာ မြင့်မားသောလုပ်ဆောင်နိုင်စွမ်း၊ တည်ငြိမ်သောစွမ်းဆောင်ရည်ဖြစ်ပြီး၊ ထိရောက်မှုမှာ ရိုးရာနက်ရှိုင်းသောအပေါက်ငြီးငွေ့ဖွယ်စက်များနှင့် သံပြားစက်များ၏ ၅ ဆမှ ၁၀ ဆအထိဖြစ်သည်။ဉာဏ်ရည်ထက်မြက်သော ထိန်းချုပ်မှုအဆင့်သည် မြင့်မားပြီး စက်ကိရိယာ၏ လုပ်ဆောင်မှုတစ်ခုစီ၏ ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုနှင့် စောင့်ကြည့်ခြင်းများသည် ရိုးရှင်းပြီး အဆင်ပြေပါသည်။လည်ပတ်ရန်လွယ်ကူသည်။
TGK25 စီးရီးစက်ကိရိယာများကို Siemens 828D ဂဏန်းထိန်းချုပ်မှုစနစ်ဖြင့် တပ်ဆင်ထားပါသည်။spindle box ကို stepless speed regulation ဖြင့် AC servo motor ဖြင့် မောင်းနှင်ထားပြီး spindle bearing သည် high-precision bearings ကို မြင့်မားသော rotation accuracy ဖြင့် လက်ခံပါသည်။feed box သည် stepless speed regulation ဖြင့် AC servo motor ကို လက်ခံပါသည်။၎င်းတွင် spindle box ၏ တိကျမှုနှင့် တည်ငြိမ်သော feed ကိုသိရှိနိုင်ရန် တိကျသောဘောလုံးဝက်အူတစ်ခု တပ်ဆင်ထားသည်။CNC scraping and rolling machine တွင် စွမ်းဆောင်ရည်မြင့် အလိုအလျောက် ချဲ့ထွင်ခြင်းနှင့် ကျုံ့ခြင်း ခြစ်ခြင်းနှင့် လှိမ့်ခြင်း ကိရိယာ၊ အထူးအဆုတ်နှင့် ဟိုက်ဒရောလစ် ကိရိယာ ဆုတ်ခွာခြင်း စနစ်၊ အလုပ်အပိုင်းကို ပြုပြင်ထားပြီး ဆလင်ဒါ၏ အစွန်းနှစ်ဖက်ကို ပြင်ပ ပိုင်းခြားခြင်းအဖြစ် အသုံးပြုပါသည်။ နေရာချထားရေးအခြေခံ။အတွင်းအပေါက်သည် တစ်ကြိမ်တည်း ငြီးငွေ့ဖွယ်ကောင်းခြင်း၊ ခြစ်ထုတ်ခြင်းနှင့် လှိမ့်ခြင်းတို့ကို လုပ်ဆောင်ခြင်းဖြင့် ပြီးမြောက်ပါသည်။စက်ကိရိယာသည် ECOROOL ဟိုက်ဒရောလစ်ခြစ်ခေါင်းအသုံးပြုရန်အတွက်သာမက pneumatic ခြစ်ခေါင်းအသုံးပြုမှုအတွက်လည်း သင့်လျော်ပါသည်။ဤပရောဂျက်သည် အလှည့်ကျ ပရောဂျက်တစ်ခုဖြစ်သည်။ဤစက်ပစ္စည်းသည် အမျိုးမျိုးသော ဟိုက်ဒရောလစ်ဆလင်ဒါများ၊ ဆလင်ဒါများနှင့် အခြားတိကျသောပိုက်ဆက်ကြောင်းများ အစုလိုက်အပြုံလိုက်လုပ်ဆောင်ခြင်းအတွက် အထူးသင့်လျော်ပါသည်။

စက်ကန့်သတ်ချက်များ
| NO | ပစ္စည်းများ | ဖော်ပြချက် |
| 1 | အတွင်းအချင်း အပိုင်းအခြားကို လုပ်ဆောင်နေသည်။ | Φ60-360mm |
| 2 | Depth Range ကို လုပ်ဆောင်နေသည်။ | 1000mm-12000m |
| 3 | စက်လမ်းညွှန် အကျယ် | 650mm |
| 4 | Spindle Center အမြင့် | 450mm |
| 5 | Spindle မြန်နှုန်း၊ အဆင့်များ | 60-1000rpm၊ ဂီယာ 4 ခု၊ stepless |
| 6 | ပင်မမော်တော် | 45/60/75KW၊ AC ဆာဗာမော်တာ |
| 7 | အစာကျွေးခြင်းအမြန်နှုန်း အတိုင်းအတာ | 5-3000mm/min (ခြေလှမ်းမဲ့) |
| 8 | ရထား အမြန်ရွေ့လျားမှု အရှိန် | 3000/6000mm/မိနစ် |
| 9 | Fixture Clamping Range | Φ120-450mm |
| 10 | မော်တာကျွေးပါ။ | 48N.m (Siemens AC ဆာဗာမော်တာ) |
| 11 | Coolant System မော်တာများ | N=7.5kw 11kw 15kw |
| 13 | Coolant System Rated Pressure ၊ | 2.5MPa |
| 14 | Coolant System စီးဆင်းမှု | 200L/min၊ 200L/min၊ 200L/min (3စုံ) |
| 15 | ဟိုက်ဒရောလစ်စနစ် အဆင့်သတ်မှတ်ထားသော ဖိအား | 7 MPa |
| 16 | လေဖိအား | ≥0.4MPa |
| 17 | ထိန်းချုပ်မှုစနစ် | Siemens |
| 18 | လျှပ်စစ်ဓာတ်အားထုတ်ပေးသောကိရိယာ | 380V50HZ၊ 3 အဆင့် (စိတ်ကြိုက်ပြင်ဆင်ပါ) |
| 19 | စက်တိုင်းတာ | L*2400*2100*(L*W*H) |
အရေးကြီးစက်အစိတ်အပိုင်းများ

1. စက်အိပ်
အိပ်ရာသည် ထောင့်မှန်စတုဂံနှစ်ထပ် လမ်းညွှန်ရထားလမ်းဖွဲ့စည်းပုံကို လက်ခံထားပြီး လမ်းပြရထားလမ်းအကျယ်မှာ 650 မီလီမီတာဖြစ်သည်။အိပ်ယာကိုယ်ထည်သည် စက်ကိရိယာ၏ အခြေခံ အစိတ်အပိုင်းဖြစ်ပြီး ၎င်း၏ တောင့်တင်းမှုသည် စက်ကိရိယာတစ်ခုလုံး၏ လုပ်ငန်းစွမ်းဆောင်ရည်နှင့် အလုပ်လုပ်ပုံတိကျမှုကို တိုက်ရိုက်သက်ရောက်သည်။ထို့ကြောင့် ဤစက်ကိရိယာ၏ အိပ်ရာကို သစ်စေးသဲဖြင့် ပုံသွင်းပြီး အရည်အသွေးမြင့် သွန်းသံ HT300 ဖြင့် သွန်းလုပ်ပါသည်။ကောင်းသောအသွင်အပြင်နှင့်ခွန်အားရှိသည်။နံရိုးပုံစံက သင့်လျော်ပါတယ်။ကုတင်၏ အပြင်ဘက်ခြမ်းကို backflow groove ဖြင့် သွန်းထားပြီး အပြင်ဘက်တွင် အကာအကွယ်အဖုံးကို တပ်ဆင်ထားပြီး၊ အသွင်အပြင်ကို အကာအကွယ်ပြုမှု ကောင်းမွန်ပြီး ဆီယိုစိမ့်မှုမရှိပါ။၎င်းသည် ဖြတ်တောက်ထားသော အရည်များကို ထိရောက်စွာ စုဆောင်းနိုင်ပြီး ထပ်ခါတလဲလဲ အသုံးပြုရန်အတွက် အတူတကွ ပြန်လည်လုပ်ဆောင်နိုင်သည်။အိပ်ယာသည် ခွဲခြမ်းခွဲခြင်းဖွဲ့စည်းပုံကို လက်ခံပြီး လမ်းပြရထားလမ်းသည် အလယ်အလတ်ကြိမ်နှုန်းကို ငြိမ်းသတ်ခြင်း (HRC50 ထက်နည်းသော မာကျောမှု၊ မာကျောမှုအတိမ်အနက် 3 မီလီမီတာထက် မနည်း) ပြီးနောက် ကြိတ်ခြင်းလုပ်ငန်းစဉ်ကို လုပ်ဆောင်ပြီး စက်ကိရိယာသည် ကောင်းစွာဝတ်ဆင်မှုခံနိုင်ရည်ရှိပြီး တိကျသောထိန်းသိမ်းမှုကို ရရှိစေသည်။
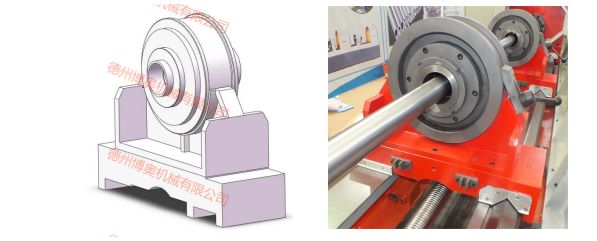
2. Boring Rod Drive Box
ငြီးငွေ့ဖွယ်ဘားသေတ္တာသည် အဓိကကျသော ပုံသဏ္ဍာန်တစ်ခုဖြစ်ပြီး feed pallet တွင် ထည့်သွင်းထားသည်။ဗိုင်းလိပ်တံအား 45KW AC servo motor ဖြင့် မောင်းနှင်ထားပြီး spindle rotation ကို speed change mechanism ဖြင့် မောင်းနှင်သော synchronous belt ဖြင့် မောင်းနှင်ပါသည်။မြန်နှုန်းအကွာအဝေးသည် 3-1000r/min၊ ဂီယာ 4 ခု၊ ဟိုက်ဒရောလစ်အလိုအလျောက်ပြောင်းခြင်း stepless speed regulation ဖြစ်သည်။လည်ပတ်မှုအမြန်နှုန်း၏ရွေးချယ်မှုကို workpiece material၊ hardness, cutting tool နှင့် chip breaking condition စသည့်အချက်များအလိုက် ဆုံးဖြတ်နိုင်သည်။မတူညီသောအမြန်နှုန်းအရ၊ ၎င်းကို ဂဏန်းထိန်းချုပ်မှုစနစ်၏ ပရိုဂရမ်ရေးဆွဲခြင်းဖြင့် သတ်မှတ်နိုင်ပြီး spindle bearings အား ဂျပန်နိုင်ငံရှိ N SK ကဲ့သို့သော တင်သွင်းသည့်အမှတ်တံဆိပ်များမှ ရွေးချယ်ထားသည်။ငြီးငွေ့ဖွယ်ဘားဘောက်စ်၏ အဓိကလုပ်ဆောင်ချက်မှာ ကိရိယာကို လှည့်ပတ်မောင်းနှင်ရန်ဖြစ်သည်။

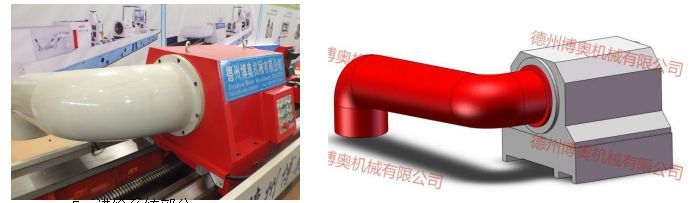
3. Oil Feeder စနစ်
စက်ကိရိယာ၏ အလယ်တွင် တည်ရှိသည်။ဆီလက်ခံသည့်အပိုင်း၏ အဓိကလုပ်ဆောင်ချက်များမှာ- ၁။ အလုပ်ခွင်သို့ အအေးခံထည့်သွင်းခြင်း။ဒုတိယ၊ လုပ်ဆောင်နေစဉ်အတွင်း tool bar ၏တုန်ခါမှုကိုလျှော့ချရန် ငြီးငွေ့ဖွယ်ဘားကို ပံ့ပိုးပါ။တတိယ၊ ဆီလိမ်းသူ၏ ရှေ့ဆုံးတွင် ခြစ်ကိရိယာကို ခြစ်ထုတ်သည့် ကိရိယာကို လုပ်ဆောင်သည့်အခါ အဝင်ပေါက်၏ လမ်းညွှန်ကို သိရှိနိုင်သည့် ကိရိယာလမ်းညွှန်လက်စွပ်ကို ကိရိယာ၏ထိပ်တွင် တပ်ဆင်ထားသည်။စတုတ္ထ၊ ဆီလက်ခံသူသည် အိပ်ယာကိုယ်ထည်ပေါ်တွင် နေရာချထားပြီးနောက်၊ ၎င်းသည် အလုပ်ခွင်ကို ဆီပြန်သည့်ကိရိယာမှတစ်ဆင့် ဟိုက်ဒရောလစ်ဖြင့် ဖိကာ အလုပ်ပစ္စည်း၏အဆုံးမျက်နှာပြင်ကို ဖိခြင်းနှင့် အလုံပိတ်ခြင်းတို့ကို ပူးတွဲလုပ်ဆောင်သည်။လမ်းညွှန်လက်စွပ်နှင့် cone ကို မာကျောရန် လိုအပ်ပြီး မာကျောမှုသည် HRC45 အထက်ဖြစ်ရန် လိုအပ်သည်။
4. ရေနံစုဆောင်းစနစ်
စက်ကိရိယာ၏ ဘယ်ဘက်စွန်းတွင် တည်ရှိပြီး ၎င်းသည် အိပ်ယာကိုယ်ထည်၏ axial direction အတိုင်း ရွေ့လျားနိုင်ပြီး အနေအထားတွင် တပ်ဆင်နိုင်သည်။အဆီပြန်သည့်ကိရိယာ၏အဓိကလုပ်ဆောင်ချက်မှာ- ပြုပြင်ပြီးသောအလုပ်ခွင်၏အလယ်ဗဟိုကိုသိရှိစေရန်အတွက် အဆုံးမျက်နှာအား မျက်နှာပြင်ကို ဖိထားပြီး ဖြတ်တောက်ထားသောအရည်များ ယိုစိမ့်ခြင်းမှကာကွယ်ရန် အအေးခံစက်ကို ဖုံးအုပ်ထားသည်။ထို့အပြင်၊ ဖြတ်တောက်ထားသောအရည်ကို စက်လည်ပတ်နေစဉ်အတွင်း ချစ်ပ်ပြားများဖြင့် ထုပ်ပိုးထားပြီး ဆီပြန်စက်၏အတွင်းပိုင်းအပေါက်မှတဆင့် chip discharge tube မှတဆင့် အလိုအလျောက် chip conveyor သို့ စီးဆင်းသွားပါသည်။ဆီပြန်သည့်ကိုယ်ထည်၏အောက်ပိုင်းကို အိပ်ရာကိုယ်ထည်အလယ်ရှိ T-shaped ဝက်အူဖြင့် ချိတ်ဆက်ထားပြီး၊ axial လှုပ်ရှားမှုသည် လုပ်ဆောင်နေစဉ်အတွင်း workpiece ၏အကြိုအနေအထားကို သိရှိနားလည်သည်။၎င်းတွင် servo motor jacking device တပ်ဆင်ထားပါသည် (jacking သည် အဆင့်မြင့်ဆုံး servo motor jacking ကို လက်ခံထားသောကြောင့် Hydraulic jacking method ကို အစားထိုးခြင်းဖြင့် အဆိုပါ jacking force ၏ ချိန်ညှိမှုကို အမှန်တကယ် သိရှိနိုင်စေရန် jacking force ကို အမှန်တကယ် သိရှိနိုင်စေပါသည်။ workpiece ၏ နံရံအထူနှင့် အချင်းများမှာ ကွဲပြားခြားနားသော၊ နှင့် မတူညီသော jacking force များကို အမြင့်ဆုံးကန့်သတ်ချက်အထိ ပုံပျက်မသွားစေရန် တားဆီးရန်အတွက် ရွေးချယ်ထားပါသည်။ ) လုပ်ငန်းဆောင်ရွက်ပြီးသော workpiece ၏ ဗဟိုချက်နှင့် တံဆိပ်ခတ်ခြင်းကို နားလည်ရန်၊ cone disc ၏ မာကျောမှုသည် HRC45 နှင့် အထက်ရှိရန် လိုအပ်ပြီး၊ နှင့် coaxiality အကြား၊ ထိပ်ဒစ်ပြားနှင့် နှိပ်ထိုင်ခုံပေါ်ရှိ ရှေ့ထိပ်ဒစ်ပြားသည် 0.05 မီလီမီတာထက်နည်းသည်။
4. စက်အစာစနစ်
ထိုင်ဝမ် Shangyin တိကျမှုမြင့်မားသောဘောလုံးဝက်အူအတွဲကို စက်ကိရိယာကိုယ်ထည်၏ အလယ်နှင့်အနောက်တစ်ဝက်တွင် တပ်ဆင်ထားပြီး 5.5KW AC ဆာဗာမော်တာဖြင့် မောင်းနှင်သည့် အဆုံးတွင် feed box ပါရှိသည်။ feed pallet (boring bar box) မှကိရိယာ။ဖိဒ်အမြန်နှုန်းကို ခြေလှမ်းမပါဘဲ ချိန်ညှိနိုင်ပြီး ကိရိယာကို အမြန်ပြန်ရုတ်သိမ်းနိုင်သည်။စက်အိပ်ရာကိုယ်ထည်၏ ရှေ့တစ်ဝက်တွင် ဆီပြန်လာသည့်ကိရိယာကို အစာကျွေးရန်၊ အလုပ်ခွင်အနေအထားကို ချိန်ညှိခြင်းနှင့် ကုပ်ခြင်းအတွက် အသုံးပြုသည့် T-shaped ဝက်အူနှင့် feed box တို့ကို တပ်ဆင်ထားသည်။နို့တိုက်ကျွေးမှုစနစ်တစ်ခုလုံးတွင် မြင့်မားသောတိကျမှု၊ တောင့်တင်းမှုကောင်းမွန်မှု၊ ချောမွေ့သောလှုပ်ရှားမှုနှင့် တိကျစွာထိန်းသိမ်းမှုတို့ ၏ အားသာချက်များရှိသည်။
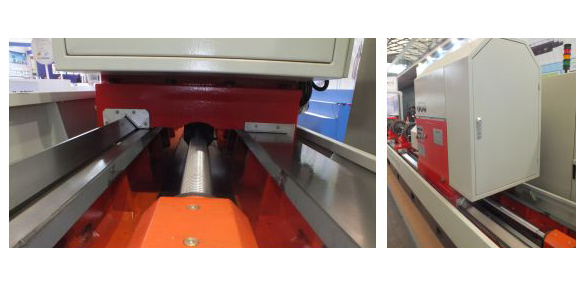
5. Boring Bar ပံ့ပိုးမှုစနစ်
ငြီးငွေ့ဖွယ်ဘား၏ ထောက်ကူစွပ်စွပ်ကို ဝက်အူများဖြင့် ကွင်းပိတ်ကိုယ်ထည်ပေါ်တွင် တပ်ဆင်ထားပြီး မတူညီသောငြီးငွေ့စရာဘားများကို အစားထိုးရန် အဆင်ပြေပြီး မြန်ဆန်သည့် ပျင်းစရာကောင်းသည့်ဘားဖြင့် အစားထိုးထားသည်။၎င်းသည် ငြီးငွေ့ဖွယ်ဘားကို ပံ့ပိုးပေးခြင်း၊ ငြီးငွေ့ဖွယ်ဘား၏ ရွေ့လျားမှုလမ်းကြောင်းကို ထိန်းချုပ်ခြင်းနှင့် ပျင်းရိဘား၏ တုန်ခါမှုကို စုပ်ယူခြင်း၏ အခန်းကဏ္ဍမှ အဓိကပါဝင်ပါသည်။လှည့်ပတ်လုပ်ဆောင်ချက်ပါရှိသော အတွင်းဘက်အထောက်ကူအင်္ကျီ။
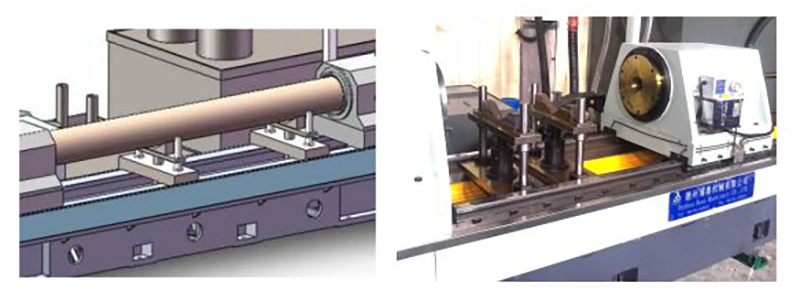
6. Workpiece Fixture ပံ့ပိုးမှုစနစ်
workpiece ကို ထောက်ကူရန် V-shaped block ကွင်းနှစ်စုံ တပ်ဆင်ထားသည်။မတူညီသော workpiece အချင်းများအလိုက် ဝက်အူနှင့် nut lift ကို မထင်သလို ချိန်ညှိနိုင်သည်။၎င်းသည် အဓိကအားဖြင့် workpiece load-bearing နှင့် adjustment အခန်းကဏ္ဍ နှင့် boring hole ၏ အနေအထား၊
7. ဟိုက်ဒရောလစ်စနစ်
စက်ကိရိယာတွင် ဟိုက်ဒရောလစ် ကိရိယာ၏ ချဲ့ထွင်မှုနှင့် ကျုံ့မှုကို ထိန်းချုပ်ရန်နှင့် လှိမ့်လှုပ်ရှားမှု၏ ထိန်းချုပ်မှုစနစ် အပြီးသတ်ရန် ငြီးငွေ့ဖွယ်ဘားဘောက်စ်၏ ဟိုက်ဒရောလစ် ရွေ့လျားမှုကို ထိန်းချုပ်ရန်အတွက် အသုံးပြုသည့် အထူးဟိုက်ဒရောလစ်စနစ် တပ်ဆင်ထားသည်။အဆင့်သတ်မှတ်ထားသောဖိအားသည် 7Mpa ဖြစ်သည်။အဓိက အစိတ်အပိုင်းများမှာ တင်သွင်းသော ရေနံသုတေသန စီးရီး ထုတ်ကုန်များ ဖြစ်သည်။
8. Coolant Filter စနစ်
အအေးခံချပ်စ်ဖယ်ရှားခြင်းနှင့် စစ်ထုတ်ခြင်းစနစ်- အဓိကအားဖြင့် စက်ကိရိယာ၏နောက်ဘက်တွင် ကွင်းဆက်အပြားဖြင့် စစ်ထုတ်ပြီးနောက် အလိုအလျောက် ချစ်ပ်ဖယ်ထုတ်သည့်စက် (ကြမ်းတိုက်ခြင်း) → ပထမအဆင့် ဆီစစ်ထုတ်ခြင်း → ဒုတိယအဆင့် ဆီစစ်ထုတ်ခြင်းနှင့် တတိယအဆင့် စစ်ထုတ်ခြင်းပြီးနောက် လည်းကောင်း၊ စစ်ထုတ်ခြင်းသံချပ်ပြားများကို ကွင်းဆက်ပြားချပ်ပြားပြားချပ်တင်ကိရိယာဖြင့် ချပ်ပြားသိုလှောင်ကားသို့ ပေးပို့ကာ အအေးခံရည်သည် ဆီတိုင်ကီသို့ ပြန်လည်စီးဆင်းကာ coolant အား အအေးခံပန့်စခန်းမှတစ်ဆင့် ဆီလက်ခံသူထံ ပေးပို့ကာ ဆီ ၃ စုံဖြင့် ပံ့ပိုးပေးပါသည်။ workpiece hole size ၏ မတူညီသောလိုအပ်ချက်များကိုဖြည့်ဆည်းရန် vane pumps များ။
workpiece ၏အတွင်းပိုင်းအပေါက်ကို ပြုပြင်သောအခါ၊ ငြီးငွေ့ဖွယ်ဘားသေတ္တာ၏ပင်မရိုးရိုးသည် ကိရိယာကိုလှည့်ရန် တွန်းအားပေးပြီး သံချပ်ပြားများကို coolant ဖြင့် ရှေ့သို့သယ်ဆောင်ကာ ဆီပြန်သည့်ကိရိယာ၏အတွင်းအပေါက်မှတဆင့် ထုတ်လွှတ်သည်။အလိုအလျောက် ချစ်ပ်ဖယ်ထုတ်သည့်စက်သည် သံချစ်ပ်များကို ချစ်ပ်သိုလှောင်သည့်ကားဆီသို့ ပို့ပေးပြီး coolant ကို စုဆောင်းပြီး ပြန်လည်အသုံးပြုနိုင်ပါသည်။
9. စက်လည်ပတ်မှု
စက်ကိရိယာလည်ပတ်မှု ထိန်းချုပ်ခလုတ်ကို နှိပ်ထိုင်ခုံပေါ်တွင် တပ်ဆင်ထားပြီး စက်ကိရိယာလည်ပတ်မှုအတွက် အဆင်ပြေစေသည့် ဖိထိုင်ခုံရထားပေါ်တွင် တပ်ဆင်ထားသည်။ဘောင်အား Matt Brushed Stainless Steel ဖြင့်ပြုလုပ်ထားပြီး ပုံသဏ္ဍာန်သည် အလုံးစုံပေါင်းစပ်ထားသော၊ လှပပြီး တာရှည်ခံပါသည်။
စက်ဆော့ဖ်ဝဲကို Siemens တွင် ဒီဇိုင်းထုတ်ထားပြီး နှစ်ပေါင်းများစွာ အသုံးပြုခဲ့သည်။ကျွန်ုပ်တို့သည် ကမ္ဘာ့အဆင့်အဖြစ် ဆက်လက်တိုးတက်နေပါသည်။
10.Electric စနစ်
၎င်းတွင် main control box ၊ operation box ၊ terminal box နှင့် cable များပါ၀င်သည် ။အဓိကလျှပ်စစ်အစိတ်အပိုင်းများမှာ Schneider အမှတ်တံဆိပ်ဖြစ်သည်။လျှပ်စစ်ထိန်းချုပ်ဘောက်စ် (လေအေးပေးစက်အအေးခံခြင်း) အတွက်။ပင်မဝါယာကြိုးအပိုင်းသည် လေကြောင်းပလပ်ဖွဲ့စည်းပုံကို လက်ခံသည်။ကေဘယ်ကြိုးများသည် နိုင်ငံတော် စံနှုန်းကို ခံယူကြပြီး အားနည်းသော လက်ရှိကေဘယ်များသည် အကာအရံကြိုးများကို လက်ခံကြသည်။အားကောင်းပြီး အားနည်းသော လျှပ်စစ်အထီးကျန်မှုနှင့်အညီ ဝိုင်ယာကြိုးများကို တင်းကြပ်စွာစီစဉ်ထားသည်။

| NO | ပစ္စည်းများ | အမှတ်တံဆိပ်များ | NO | ပစ္စည်းများ | အမှတ်တံဆိပ်များ |
| 1 | စက်သတ္တုကိုယ်ထည် | မိမိဘာသာပြုလုပ်ထားသော | 2 | ငြီးငွေ့စရာ ဘားဒရိုက်ဘောက်စ် | မိမိဘာသာပြုလုပ်ထားသော |
| 3 | ပံ့ပိုးမှုဘောင် | မိမိဘာသာပြုလုပ်ထားသော | 4 | ဗိုင်းလိပ်တံ ထမ်းခြင်း။ | ဂျပန် NSK |
| 5 | အခြားဝံ | တံဆိပ်ကောင်းများ | 6 | ဘောလုံးဝက်အူ | ထိုင်ဝမ်အမှတ်တံဆိပ် |
| 7 | အဓိကလျှပ်စစ်ဒြပ်စင်များ | schneider သို့မဟုတ် siemens | 8 | ဗိုင်းလိပ်တံမော်တာ | တရုတ်အမှတ်တံဆိပ် |
| 9 | အစာကျွေးခြင်း servo မော်တာ | Siemens | 10 | အစာကျွေးခြင်း servo driver | Siemens |
| 11 | CNC စနစ် | Siemens | 12 | Pneumatic ဒြပ်စင်များ | ဂျပန် SMC |
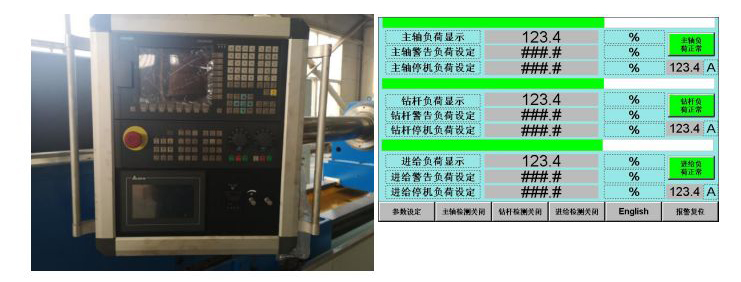
10.CNC ထိန်းချုပ်မှုစနစ်
စက်ကိရိယာတွင် SIMENS828D CNC စနစ်ဖြင့် တပ်ဆင်ထားပြီး အအေးခံဖိအားကို တူရိယာများဖြင့် ပြသထားသည်။feed motor သည် servo motor ဖြစ်ပြီး boring bar box motor ကို တင်သွင်းပါသည်။လူကိုယ်တိုင် ကျွေးမွေးခြင်း၊ မိမိကိုယ်ကို ရောဂါရှာဖွေခြင်း လုပ်ဆောင်ချက်။အဆင့်အတန်းပြသမှု၊
လက်ရှိအနေအထားပြသမှု၊ ပရိုဂရမ်ပြသမှု၊ ကန့်သတ်ချက်ဆက်တင်ပြသမှု၊ နှိုးဆော်ချက်ပြသမှု၊ ဘာသာစကားမျိုးစုံပြသမှုပြောင်းလဲခြင်းစသည်ဖြင့် RS232/USB မျက်နှာပြင်ဖြင့် ၎င်းကို စက်ပြင်ပတွင် ပရိုဂရမ်ပြုလုပ်နိုင်သည်။ကွန်ပျူတာတွင် စွန့်ပစ်ပြီး သိမ်းဆည်းထားနိုင်သည့် ပရိုဂရမ်အဝင်နှင့် အထွက် အင်တာဖေ့စ်တစ်ခု တပ်ဆင်ထားသည်။ပင်မထိန်းချုပ်မှု panel နှင့် လည်ပတ်ခလုတ်ဘူတာရုံ၊ တရုတ်လုပ်ငန်းဆောင်တာမျက်နှာပြင်နှင့် လည်ပတ်မှုခလုတ်များ၊ ခလုတ်များ စသည်တို့ကို စီစဉ်သတ်မှတ်ပါ။ ပင်မထိန်းချုပ်မှုဂရပ်ဖစ်လူသား-စက်မျက်နှာပြင်ကို စက်ကိရိယာများ၏ အခြေအနေကို စောင့်ကြည့်ရန်၊ ချို့ယွင်းချက်များကို ပြသရန်နှင့် အခြားစီမံခန့်ခွဲမှုအချက်အလက်များအတွက် အသုံးပြုသည်။ကိုယ့်ကိုယ်ကိုယ် ရောဂါရှာဖွေခြင်း၊ မိမိကိုယ်ကို ကာကွယ်ခြင်း လုပ်ဆောင်ချက်ဖြင့် LCD မျက်နှာပြင် တပ်ဆင်ထားသည်။
ထို့အပြင်၊ သီးခြားတူးလ်ကာကွယ်မှု မော်ဂျူးတစ်ခုကို ထည့်သွင်းထားသည်- ထိုင်ဝမ်မြစ်ဝကျွန်းပေါ် PLC + လူ-စက်ဆွေးနွေးပွဲ ထိတွေ့မျက်နှာပြင်ကို အချိန်နှင့်တပြေးညီ လုပ်ဆောင်နေသည့် ကိရိယာအခြေအနေကို စောင့်ကြည့်ရန် အသုံးပြုပါသည်။ကိရိယာသည် ပုံမှန်အခြေအနေ၏ ကြိုတင်သတ်မှတ်ထားသောတန်ဖိုးထက် ကျော်လွန်သည့်အခါ၊ စက်ကိရိယာတူးလ်ကာကွယ်မှုသည် အဆင့်နှစ်ဆင့်ဖြင့် အချက်ပေးမည် သို့မဟုတ် အလိုအလျောက်ရပ်တန့်မည်ဖြစ်ပြီး၊ ၎င်းအတွက် အကျိုးရှိသော စက်ကိရိယာ၏ရွေ့လျားနေသောအစိတ်အပိုင်းများ၏ လည်ပတ်နေသည့်အခြေအနေကို အလိုလိုသိမြင်နိုင်သည်၊ ကိရိယာပျက်စီးခြင်းမှကာကွယ်ခြင်းနှင့် workpiece processing ၏ဘေးကင်းမှု။ကန့်သတ်ချက်ဆက်တင်သည် ရိုးရှင်းသည်၊ အလိုလိုသိသည်၊ အဆင်ပြေပြီး ယုံကြည်စိတ်ချရသည်။"တူးလ်လော့ခ်ချခြင်း" ဖြစ်စဉ်ကို ထိထိရောက်ရောက်ရှောင်ရှားရန် PLC ကိရိယာကာကွယ်ရေးလုပ်ဆောင်ချက် မော်ဂျူးကို ထည့်သွင်းထားသည်။